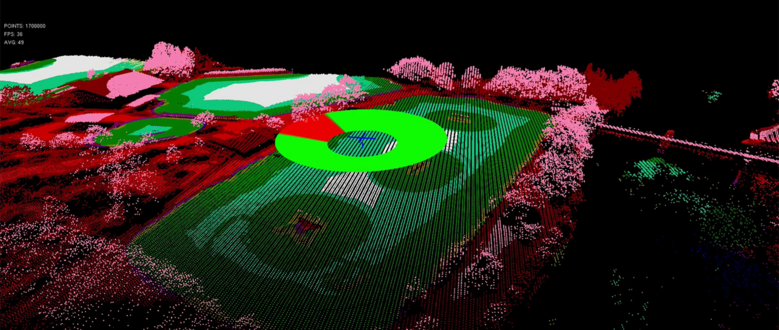
A tecnoloxía LiDAR baséase en sensores que emiten luz láser e recollen o reflexo desta no obxecto no que incide na superficie terrestre. Cando o sensor vai integrado nun vehículo aéreo (avionetas, helicópteros, drons...) denomínase LiDAR aéreo. A información obtida mediante esta tecnoloxía constitúe unha nube densa de puntos tridimensional caracterizada pola posición (con alta precisión no espazo) de cada un dos puntos onde se reflicte o feixe láser, e tamén polo número de rebotes que se producen, así como pola intensidade do feixe reflectido, entre outras características. Toda esta información é moi útil en moitas aplicacións.
No CiTIUS desenvolvemos algoritmos que permiten procesar estas nubes de puntos para a súa aplicación en diferentes fins. Este demostrador amosa algúns resultados en problemas prácticos concretos, entre outros:
- Procura de zonas de aterraxe para helicópteros en situacións de emerxencia (por exemplo, en intervencións durante incendios forestais ou en evacuación de persoas).
- Caracterización de viais públicos.
- Identificación e estudo preciso de liñas eléctricas e a súa contorna.
Na actualidade estamos a ampliar o procesamento a novas aplicacións e ao uso de nubes de puntos obtidas con dispositivos de LiDAR terrestre.
Tamén estamos a analizar a adaptación dos nosos desenvolvementos a nubes de puntos 3D obtidas con tecnoloxías diferentes, como a fotogrametría, que está baseada en imaxes e presenta propiedades moi diferentes ás das nubes de puntos LiDAR. Desde o punto de vista técnico, o reto máis importante é o de conseguir procesar esta cantidade masiva de datos cun alto rendemento, tanto en termos de tempos de execución (usando principalmente técnicas de computación paralela) como no que atinxe ao uso eficiente da memoria do computador (introducindo novas estruturas de almacenamento paralelo que aproveiten a localidade dos nosos algoritmos).
Autores
-
- Investigadores
- Francisco Fernández Rivera
- David López Vilariño
- José Carlos Cabaleiro Domínguez
- Tomás Fernández Pena
- Óscar García Lorenzo
- Jorge Martínez Sánchez
- Miguel Yermo García
-
- Programas científicos
- Computación avanzada
-
- Colaboradores
- Mission Critical Services Spain, Babcock



